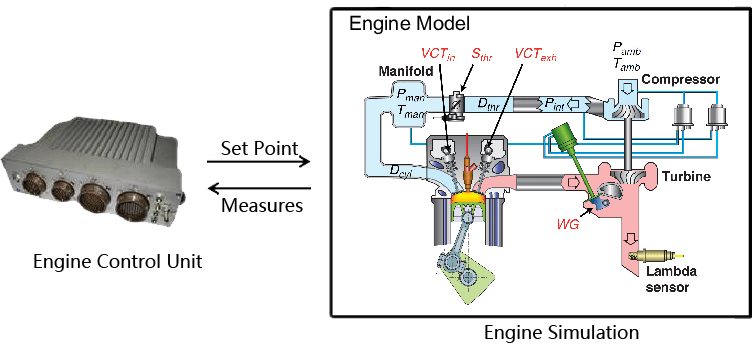
Hardware-in-the-Loop (HiL) testing is a real-time simulation method used to validate electronic control units before vehicle or system-level testing. It connects the real ECU with a simulated vehicle, sensor, actuator, and fault environment, allowing engineers to verify control strategies, communication behavior, safety functions, and failure responses under repeatable test conditions.
Takemind provides customized HiL testing solutions for automotive ECUs, BMS, powertrain controllers, body controllers, and other embedded control systems. The solution can integrate real-time simulation, CAN/LIN/FlexRay/Ethernet communication, signal conditioning, fault injection, data acquisition, and automated test execution to support R&D validation and system verification.