UDS(统一诊断服务)—— 轻松入门
“本文介绍了UDS(统一诊断服务)协议及其在汽车电子控制单元(ECU)中的应用。内容涵盖UDS的通信方式、客户端-服务器模式、诊断和固件更新功能。详细解释了UDS消息结构,包括协议控制信息(PCI)和服务标识符(SID)。此外,还介绍了UDS在读取故障诊断代码(DTC)、提取参数数据和启动诊断会话等方面的具体应用。”
1. 什么是UDS协议?
统一诊断服务(UDS)是一种通信协议,广泛用于汽车的电子控制单元(ECU)。这个协议主要帮助进行各种诊断、更新固件、做常规测试等任务。UDS(即ISO 14229)是一个跨制造商和跨技术的标准,它支持多种通信方式,包括CAN、KWP 2000、以太网、LIN等。目前,几乎所有一级供应商和整车制造商的ECU都在使用这个协议。
在实际使用中,UDS遵循客户端-服务器的通信模式。这里的测试工具就是客户端,而车辆的ECU则充当服务器。比如说,你可以通过将CAN总线接口插到车的OBD2连接器上,然后向车辆发送UDS请求。如果ECU支持UDS,它就会根据你的请求做出回应。
基于UDS可以做很多事情:
- 读取/清除故障诊断代码(DTC),以排除车辆问题
- 提取温度、电量状态、VIN等参数值数据值
- 启动诊断会话,例如测试安全关键特性
- 通过固件刷新来更新控制器软件
2. UDS消息结构
UDS是一个基于请求的协议。在下图中,我们简单描述了一个UDS请求帧的例子(使用CAN总线):

2.1 协议控制信息(PCI)
PCI字段虽然和UDS协议的具体内容没直接关系,但如果你想在CAN总线上发送UDS请求,这个字段就必不可少。简单来说,PCI字段的长度从1到5个字节不等。它包含了一些关键参数,这些参数帮助我们把长的UDS消息拆分成几个短的CAN报文。这部分内容其实属于ISO-TP协议的范畴,ISO-TP会详细介绍如何进行这种操作。
2.2 服务ID(SID)
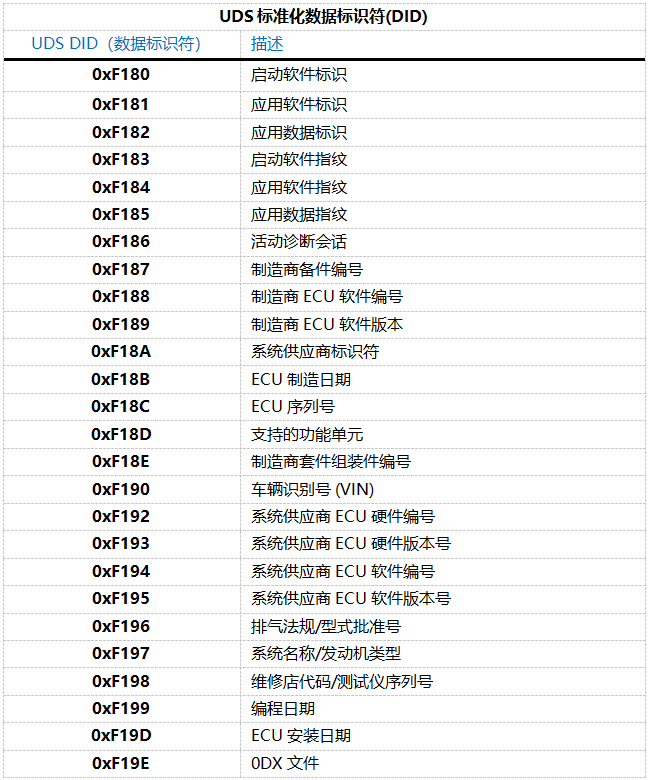
当我们使用UDS去执行不同的服务时,我们需要在传输的报文里使用特定的UDS服务标识符(SID)。这些标识符主要有两种:请求标识符和响应标识符。通常,响应标识符就是请求标识符的数值上加上0x40。如果你看下面的图表,你会发现UDS(ISO 14229)标准支持的所有请求和响应标识符都列在那里了。
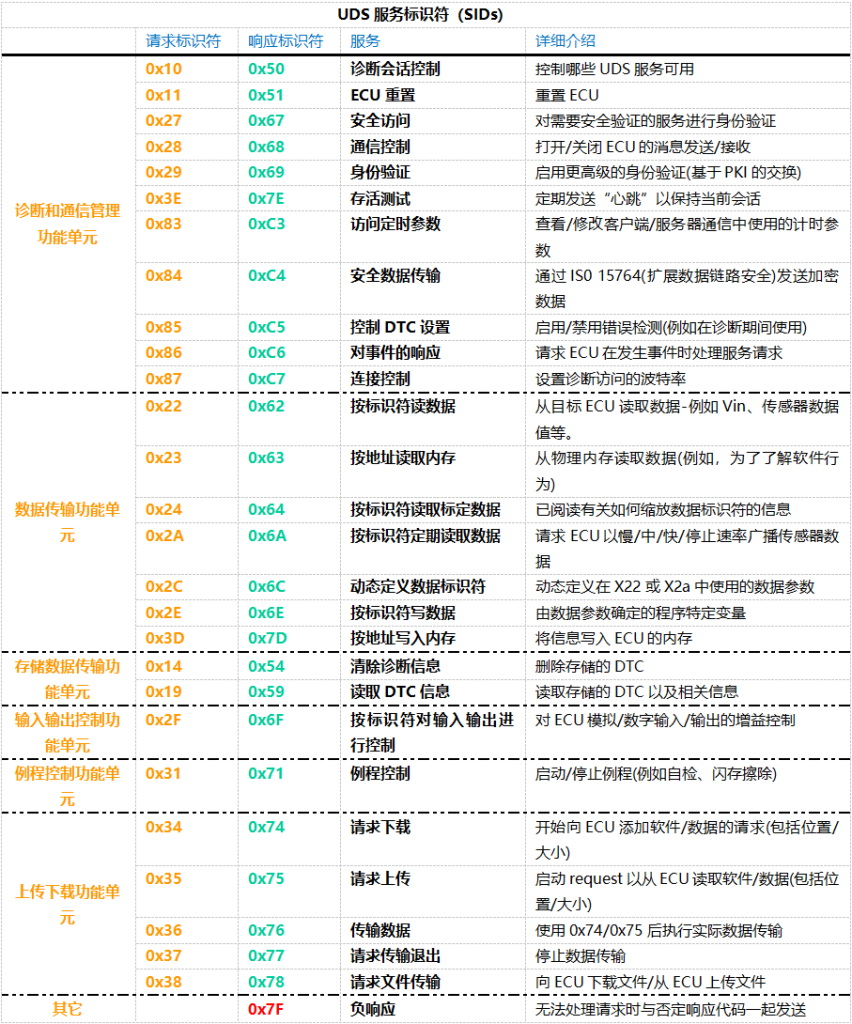
确实,UDS服务标识符(SID)中只有一部分数字是被标准化使用的。还有一些服务标识符被其他标准所使用。例如,从0x00到0x0F的标识符是专门为OBD服务保留的。这种区分有助于避免不同系统间的标识符冲突,确保每种服务的唯一性和可识别性。

2.3 子函数字节
在UDS(统一诊断服务)中,除了用服务标识符(SID)来调用不同的服务,还有一个叫做子函数字节的东西来扩展功能。这个子函数字节由两部分组成:
首先是肯定响应抑制标识符,它占据了字节的第一个比特位。通常,当你向车辆的电控单元(ECU)发送一个请求时,ECU会回应说它收到了(肯定响应)或者请求有问题(否定响应)。如果你设置这个抑制标识符为1,那么ECU就不会发送肯定响应了,但如果有问题,它还是会发送否定响应。
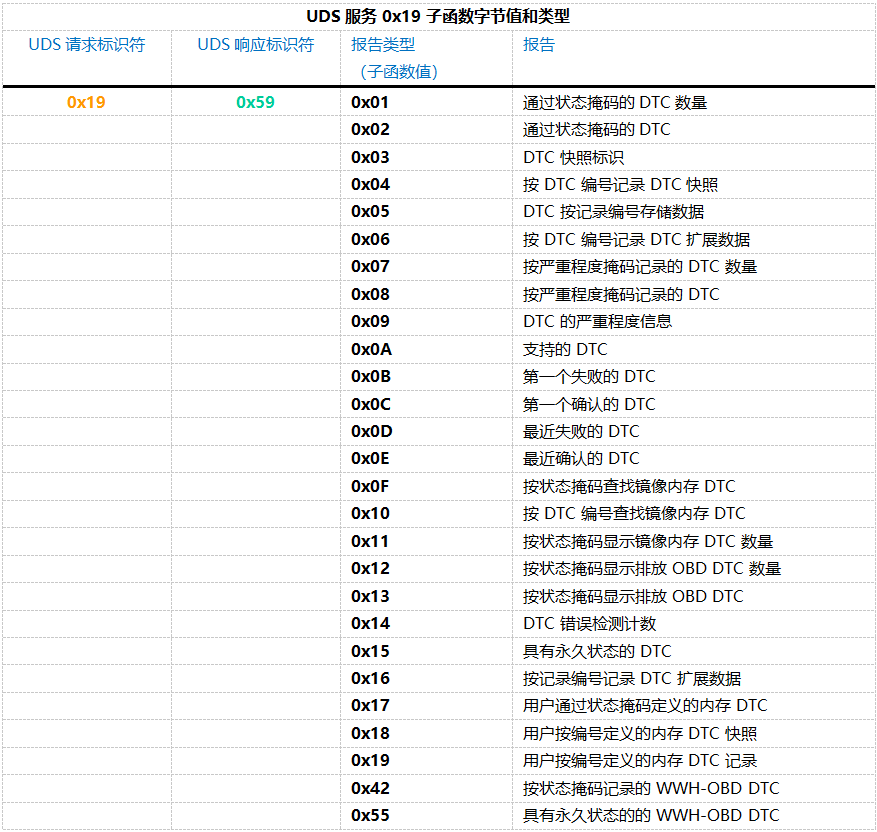
其次,字节里剩下的7个比特位用来定义多达128个不同的子函数值。这就像是给基本功能加上一些变化。比如说,使用SID=0x19(读取诊断信息)来读取故障代码(DTC),这些子函数就能帮你控制想要的报告类型。
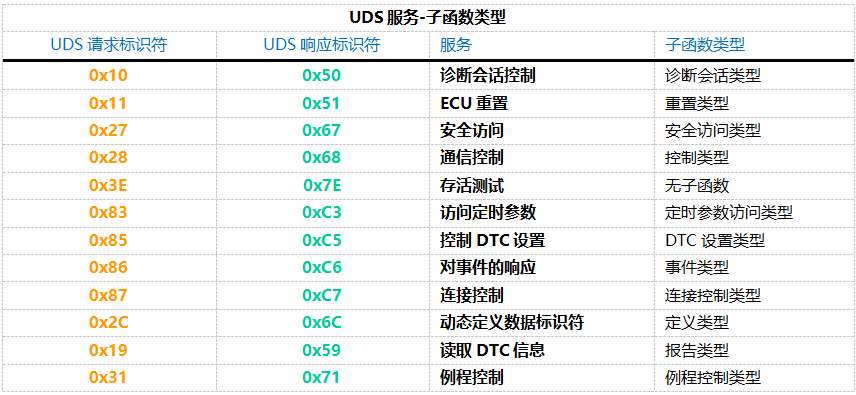
只有部分UDS服务是支持子函数的如下图,其他服务是不支持的。
2.4 请求数据参数
在UDS(统一诊断服务)的大多数请求中,除了我们之前讨论的服务标识符和子函数字节,还有一个叫做请求数据参数的部分,这可以帮助我们进一步定制我们的请求。来看两个例子来更好地说明这一点:

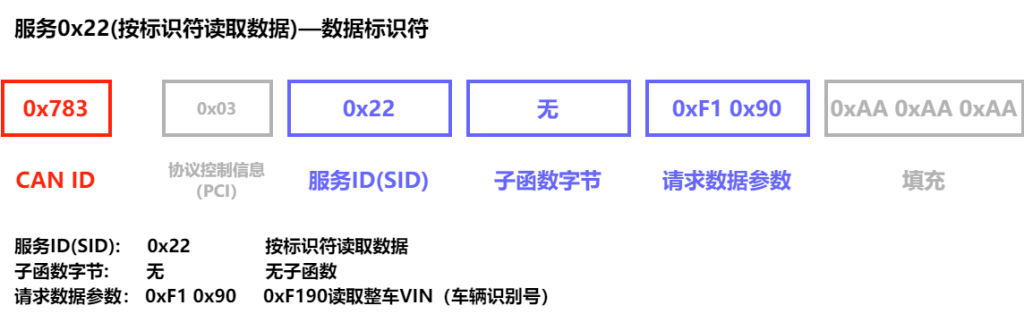
上例中0x22服务中使用一个数据标识符(DID),长度2字节值来获取ECU里面对应DID的数据结果。部分DID对应的数据含义已经在标准中定义了。
3. UDS响应结构
3.1 UDS的肯定响应

当汽车的电控单元(ECU)收到一个UDS请求并且可以正常处理时,它会发回一个肯定响应。这个肯定响应的结构跟请求时用的结构很像。比如,如果你发送了一个服务请求0x22来获取某个特定的数据,那么ECU的肯定响应会以响应服务标识符0x62开始(这就是请求标识符0x22加上0x40),紧接着是2字节的数据标识符(DID),然后是你请求的那个DID的实际数据。
每种服务的正面响应消息的具体结构可能会有所不同,这取决于服务的种类。但大体上,ECU的回复会告诉你请求是否成功,并提供你需要的数据。这种方式确保了信息的清晰传达和问题的有效解决。
3.2 UDS的否定响应
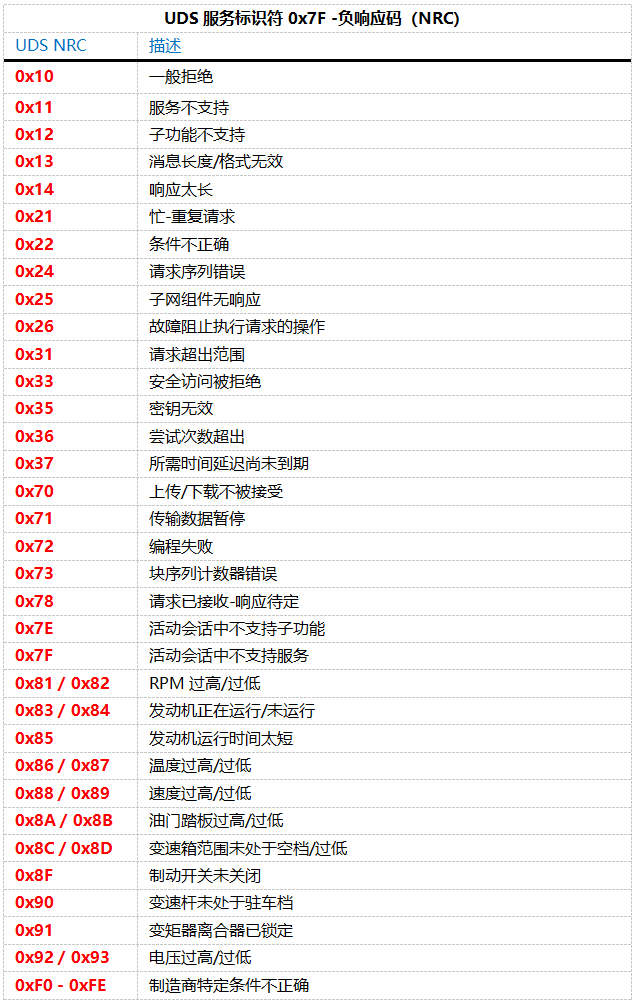
当车辆的电控单元(ECU)无法对一个UDS(统一诊断服务)请求提供肯定响应时,它会发送一个否定响应,比如ECU不支持你请求的服务时。否定响应的结构通常包括几个部分:

- 第一个字节,协议控制信息(PCI):这部分和UDS的具体操作无关,但它是UDSonCAN响应消息的必要组成。
- 第二个字节,否定响应码:这个字节固定为0x7F,用来标识这是一个否定响应。
- 第三个字节,被拒绝的服务标识符(SID):这里会显示你原始请求中用的那个SID。
- 第四个字节,否定响应码(NRC):这个码提供了请求失败的具体原因,比如“不支持该服务”或“请求格式错误”等。
- 第五个字节,原因代码:这只在NRC为0x22时出现,即“条件不正确”时,会进一步解释拒绝的详细原因。
这样的响应结构让你能清楚地了解请求失败的具体原因,并根据这些信息调整你的诊断策略。通过这种方式,技术人员可以更有效地识别问题,并采取适当的措施来解决。
4. UDS vs. CAN总线
要真正弄懂UDS,我们需要看看它是如何在OSI模型里与CAN总线标准一起工作的。想象一下,OSI模型像一栋楼,不同的楼层代表不同的技术层级。CAN标准就像是在这栋楼的底部,负责最基础的任务,也就是让数据能在车辆的网络中物理传输,这部分包括了物理层和数据链路层。
而UDS则在楼层更高一些的位置,具体来说,它涵盖了会话层和应用层。会话层就像是保证我们发送的信息能按顺序且完整地到达,而应用层则更进一步,直接处理诊断信息,确保车辆的系统能理解和使用这些数据。
通过这种方式,我们可以看到UDS和CAN怎么合作,让车辆的诊断和通信既精确又高效。
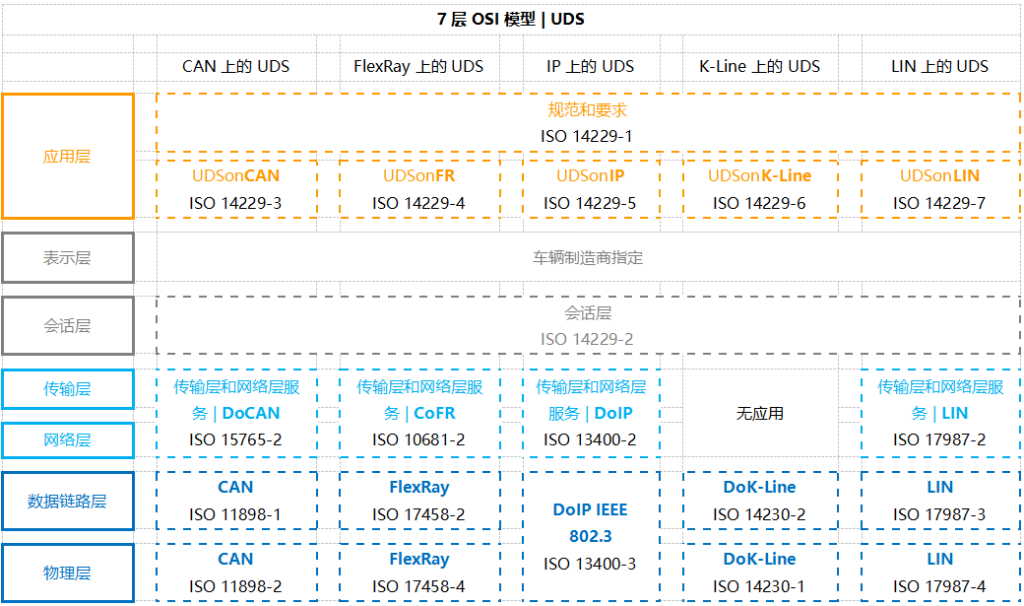
ISO 14229-1(应用层)
ISO 14229-1标准详细定义了UDS(统一诊断服务)的应用层要求,这些要求是独立于任何底层通信协议的。该标准主要涵盖以下几个关键领域:
- 客户端与服务器之间的通信流程,包括请求和响应等交互模式。
- 各类具体的UDS服务功能。
- 肯定响应和否定响应的编码(Negative Response Codes,NRCs)。
- 其他相关定义,如诊断故障代码(Diagnostic Trouble Codes,DTCs)、数据标识符(Data Identifiers,DIDs)等。
ISO 14229-3(基于CAN的应用层)
ISO 14229-3的主要目标是在CAN总线上实现统一诊断服务(UDS),即UDSonCAN。该标准并没有定义任何特定的车载CAN总线架构的具体实现,而是附加了一些针对UDSonCAN的特定需求和限制。具体来说,ISO 14229-3详细概述了哪些UDS服务在应用于CAN时有特定的需求。其中,受影响的服务包括响应事件的周期标识符和读取数据的操作,这些CAN特定的需求在标准中有详尽的阐述。除此之外,所有其他的UDS服务都遵循ISO 14229-1和ISO 14229-2的规定。
此外,ISO 14229-3还描述了ISO 14229-2和ISO 15765-2(ISO-TP)之间的映射关系,以及在使用UDS和OBD时11位和29位CANID的具体要求。
ISO 14229-2(会话层)
UDS标准(ISO 14229-1)详细描述了OSI模型中的会话层,特别是服务请求、确认和指示原语的实现。这些接口原语为UDS与任何底层通信协议之间的交互提供了标准化的接口。通过这种方式,UDS能够在各种不同的车辆网络环境中实现,确保了其广泛的兼容性和灵活性。
ISO 15765-2(CAN的传输+网络层)
对于基于CAN的UDS,ISO 15765-2标准扮演了核心角色,它详细描述了诊断请求和响应的实现机制。具体而言,该标准阐释了如何通过多个CAN帧的组合来传输较大的数据有效负载。这一过程是实现UDSonCAN的关键步骤,确保了复杂数据的顺利传递与处理。
ISO 11898(CAN的物理+数据链路层)
在UDSonCAN中,基本的CAN通信协议定义在ISO 11898-1和ISO 11898-2标准中,涵盖了CAN总线的物理层和数据链路层规范。这两个标准共同构成了CAN通信系统的基础框架,确保了数据传输的标准化和可靠性。
5. ISO 15765-3 vs. ISO 14229-3
在CAN总线上的UDS协议,之前是按照ISO 15765-3:2004标准来设定的。但到了2012年,这个旧标准被ISO 14229-3取代了。新的ISO 14229-3标准对CAN总线上的UDS(也就是UDSonCAN)进行了更详细的规定,这样做是为了确保系统与更多设备兼容,同时满足最新的技术要求。
6. UDS数据是公开的吗?
UDS(统一诊断服务)其实就是一种由制造商定制的车辆诊断协议。虽然UDS的大框架是标准化的,但具体到每条数据怎么解读,这些都还是厂家的秘密,一般我们普通人是不太知道的。比如,UDS可以让你通过一个特定的服务来从车辆的电控单元(ECU)拉数据,但具体要用什么代码,或者数据意味着什么,这些信息并没有公开标准化。
不过,对于支持某些特定协议的车(比如WWH-OBD或OBDonUDS),我们还是可以比较容易地拿到一些基本数据,比如车速或者发动机转速,这些通常用一些固定的代码(比如前缀是0xF4的)就能查到。但如果要深入了解更多细节,除非你是车厂的工程师,不然可能需要通过一些技术手段,像是反向工程,这可是相当复杂的技术活。幸好,现在网上有一些高手已经分享了他们的成果,比如反向工程出来的数据表和dbc文件,这对相关从业者来说,还是挺有用的。
7. UDS为什么越来越重要?
现在大部分车都用OBD2,这是一种车辆诊断系统,可以帮助我们读取车速、转速、油门位置和燃油水平等信息。但是,未来OBD2可能不会这么普遍了。首先,有一种新的系统叫做WWH-OBD或者基于UDS的OBDonUDS,它可能会逐渐取代OBD2,成为新的行业标准。其次,随着电动车越来越多,法律可能不再要求车辆一定要支持OBD2。而且,电动车有些特别的信息,比如电池电量(SoC)和电池健康状况(SoH),OBD2是读不出来的。不过,大多数电动车还是会支持UDS系统,因为UDS可以获取更多种类的数据。随着电动车市场的扩大,基于UDS的通信变得越来越关键了。
8. 软件定制开发(Dots)
如果你想更好地与车辆通信系统交互,定制开发UDS PC软件可能是一个很好的选择。通过定制开发,你可以拥有一个完全符合你特定需求的软件工具,无论是进行诊断、固件更新,还是执行特定的监控任务。这种软件可以设计成用户友好、功能丰富,支持多种车辆通信协议,如CAN、Ethernet等。
这样的软件开发服务通常包括需求分析、系统设计、实现编码、测试验证,直到最终的部署和支持。开发团队会与你紧密合作,确保软件完全符合你的操作流程和技术规格,同时也能灵活应对将来可能的需求变更。此外,定制的UDS PC软件还可以整合先进的数据分析和可视化工具,帮助你更有效地理解车辆数据,提升诊断和维护效率。通过这种专业的软件定制服务,你可以大大提高工作流程的自动化和精确度,让车辆维护和测试变得更简单、更高效。
示例1:获取和解码DID数据(车辆识别代号)
让我们来看一个具体的例子,了解如何使用UDS协议读取车辆识别号(VIN)。在这个示例中,我们将使用数据标识符0xF190来读取车辆识别号,这个识别号可以在UDS标准中获知。
我们将使用我们定制化软件软件作为我们的工具。
步骤如下:
- 发送请求:使用UDS服务0x22(读取数据标识符)发送请求,数据标识符为0xF190。
请求帧示例:03 22 F1 90 AA AA AA AA
- 接收响应:车辆会响应并返回包含车辆识别号的帧。
响应帧示例:62 F1 90 56 49 4E …(其中,56 49 4E …代表车辆识别号的具体字符)
通过上述步骤,我们可以轻松地获取车辆识别号。这种方式不仅适用于技术人员,任何对车辆诊断有兴趣的人都可以尝试使用。使用UDS协议读取车辆信息变得简单而直观。
示例2:读取DTC故障码(DTC 0x080511,离合器位置传感器短地)
在这个示例中,我们将展示如何使用UDS协议读取所有的历史故障。假设现在控制器里面只有一个历史故障,即离合器位置传感器短路故障(DTC:0x080511,状态:0x2F)。
我们将使用UDS服务0x19(诊断故障码相关服务)中的子功能0x02(通过状态掩码读取DTC),并指定状态掩码为0x08(历史故障)。状态掩码的作用:状态掩码与DTC的实际状态按位逻辑与,结果非零,则匹配。
步骤如下:
- 发送请求:使用UDS服务0x19的子功能0x02,带上状态掩码0x08。
- 请求帧示例:03 19 02 08 AA AA AA AA
- 接收响应:车辆会响应并返回包含特定状态的故障码信息。
响应帧示例:07 59 02 08 08 05 11 2F(其中,08 05 11表示DTC 0x080511,2F为该故障的状态码)
通过上述步骤,我们可以成功读取状态掩码为0x08的故障码。在这个例子中,我们读取了DTC 0x080511,表示离合器位置传感器短路,并且确认了其状态码为08。这种方法帮助我们更精确地诊断和解决车辆问题。
示例3:刷写Flash数据
统一诊断服务(UDS)是车辆通信的一个超级实用工具,除了能进行诊断和安全检测等操作。还可以用来更新车上电子控制单元(ECU)的固件,
每个车厂和控制器的UDS刷写过程可能有点不同,具体步骤要根据车厂的具体要求来调整,但基本的流程大概是这样的:
-
开启诊断会话:首先,我们用诊断会话控制服务(SID=0x10)启动一个扩展会话。这种会话让我们可以进行写操作和其他需要更多权限的操作。
-
进行安全认证:安全访问服务(SID=0x27)确保只有授权的工具才能进行写操作或其他敏感操作。这通常包括一个请求和响应的过程,防止未授权访问。
-
准备数据下载或上传:接下来,我们用请求下载服务(SID=0x34)或请求上传服务(SID=0x35)来为接收或发送数据做准备。这里要设置数据的大小和存储地址等。
-
传输数据:数据传输服务(SID=0x36)是用来实际传送数据的。在固件更新的情况下,诊断工具会分几次把固件数据包发给ECU。
-
结束传输:传输退出服务(SID=0x37)标志着数据传输结束,此时ECU会开始处理收到的数据,比如把新固件写进闪存。
-
重启控制器:更新完毕后,通常会用控制单元重置服务(SID=0x11)来重启ECU,确保新固件能正确加载并运行。
这就是UDS刷写的基本流程。虽然每个厂商或控制器的具体步骤可能会有些不同,比如某些服务的细节或顺序可能会根据具体的硬件和软件需求调整,但整个过程的核心目标是确保固件能安全、有效地更新。这样一来,车辆的系统就能保持最新,运行更加顺畅。
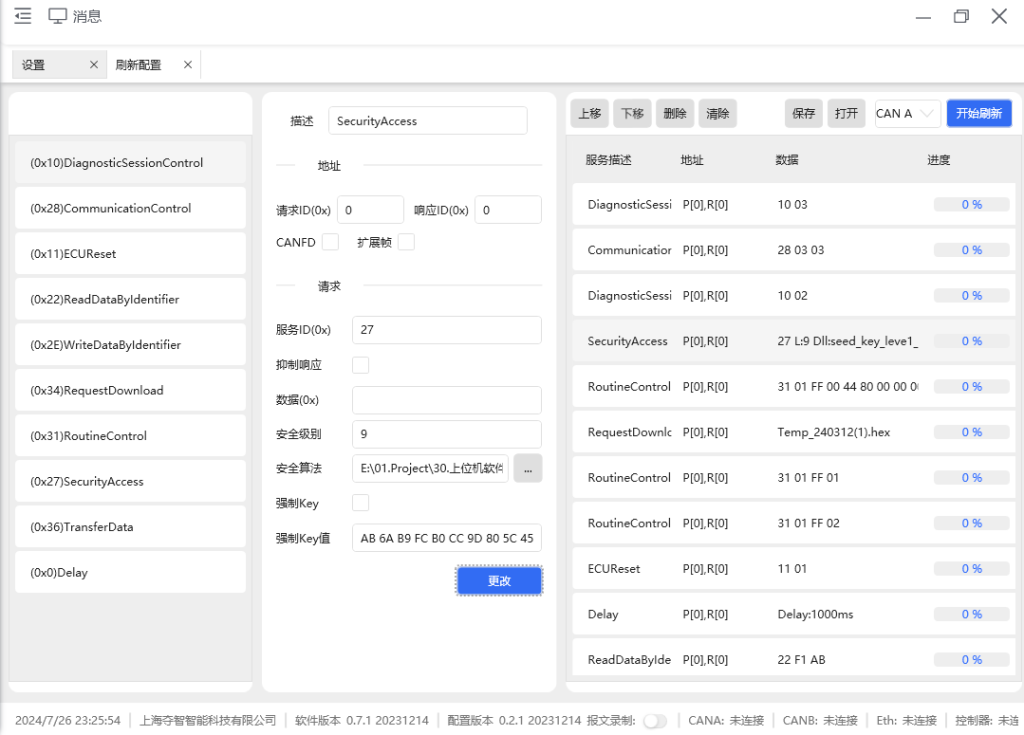
在Dots定制化开发中,我们提供了非常灵活的解决方案,能够精准满足各种厂商的特定需求。不论是执行标准的刷写流程还是进行复杂的定制化操作,客户都能根据自己刷新流程配置出自己需要刷新流,从快速应对不同项目的需求。
此外,我们还使用了广播刷写技术,这一技术允许在厂线上批量刷新多个控制器。通过将固件更新包通过广播方式同时发送到多个控制器,这能大幅节省了时间。